Learning Dexterity
Machine-readable: Markdown · JSON API · Site index
Описание видео
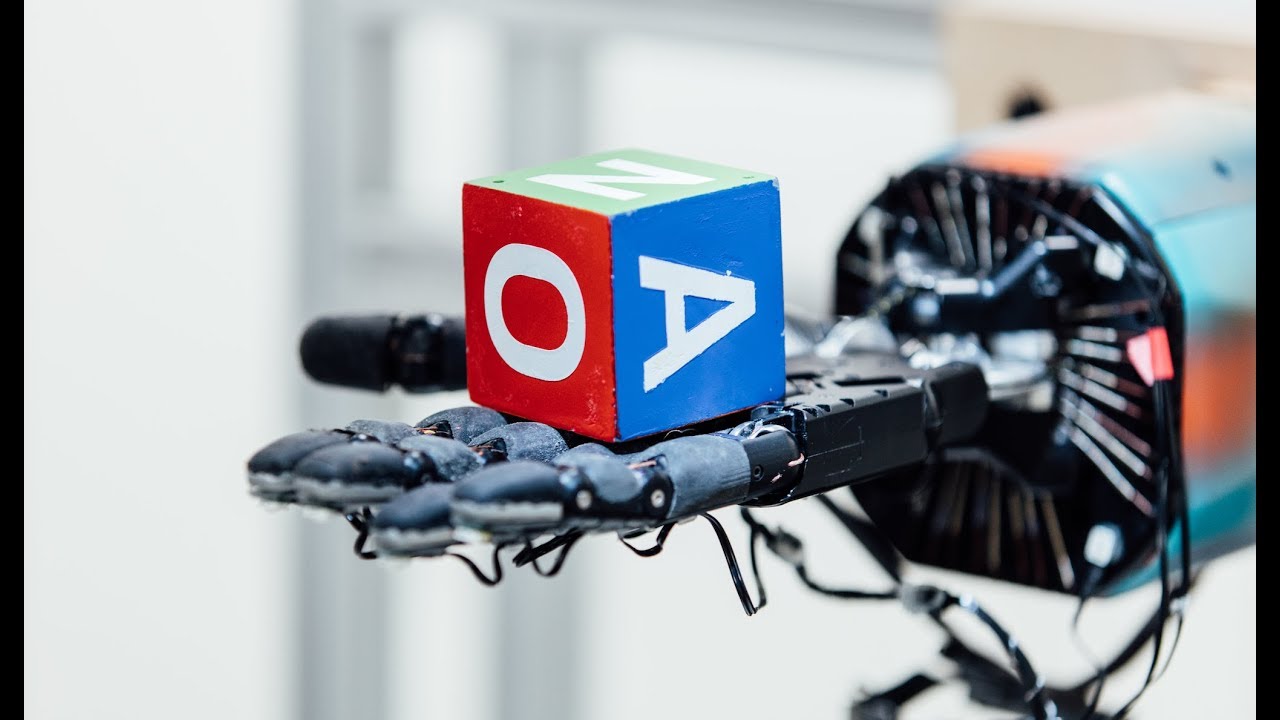
We’ve trained a human-like robot hand to manipulate physical objects with unprecedented dexterity. Our system, called Dactyl, is trained entirely in simulation and transfers its knowledge to reality, adapting to real-world physics using techniques we’ve been working on for the past year. Dactyl learns from scratch using the same general-purpose reinforcement learning algorithm and code as OpenAI Five. Our results show that it’s possible to train agents in simulation and have them solve real-world tasks, without physically-accurate modeling of the world.
Learn more: https://blog.openai.com/learning-dexterity/
Directed by: Jonas Schneider
Starring: Alex Ray
Sound Supervisor: Larissa Schiavo
Production Design: Ben Barry
Production Manager: Diane Yoon
Stills Photographer: Eric Louis Haines
Sound Effects: InspectorJ https://freesound.org/people/InspectorJ/sounds/411088/ CC-Attribution
Music: "Bring Your Own" by Dexter Britain, "Intermediary" by Mattijs Muller