❤️ Check out Lambda here and sign up for their GPU Cloud: https://lambda.ai/papers
Guide:
Rent one of their GPUs with over 16GB of VRAM
Open a terminal
Just get Ollama with this command - https://ollama.com/download/linux
Then run ollama run gpt-oss:120b - https://ollama.com/library/gpt-oss:120b
📝 The paper "Neural Robot Dynamics" is available here:
https://neural-robot-dynamics.github.io/
https://github.com/NVlabs/neural-robot-dynamics
📝 My paper on simulations that look almost like reality is available for free here:
https://rdcu.be/cWPfD
Or this is the orig. Nature Physics link with clickable citations:
https://www.nature.com/articles/s41567-022-01788-5
🙏 We would like to thank our generous Patreon supporters who make Two Minute Papers possible:
Benji Rabhan, B Shang, Christian Ahlin, Gordon Child, Juan Benet, Michael Tedder, Owen Skarpness, Richard Sundvall, Steef, Taras Bobrovytsky, Tybie Fitzhugh, Ueli Gallizzi
If you wish to appear here or pick up other perks, click here: https://www.patreon.com/TwoMinutePapers
My research: https://cg.tuwien.ac.at/~zsolnai/
X/Twitter: https://twitter.com/twominutepapers
Thumbnail design: Felícia Zsolnai-Fehér - http://felicia.hu
#nvidia
Оглавление (2 сегментов)
Segment 1 (00:00 - 05:00)
You are going to see many insane things in this video because this research paper is jaw-dropping. It is about teaching a robot to dream. Yes. And dream so vividly that these dreams are going to start coming true. True insanity. Okay. So, I bet you saw many of these videos of robots doing these really impressive acrobatic things. Parkour, flips, dance routines, you name it. These are all making the rounds in the media these days. And it looks like we suddenly jumped 100 years into the future, right? Well, not quite. But very few know that these are not the hard problems. Really? Why? Well, because these all happen in controlled environments. Every step is known in advance. Yep, this is easy. The really hard problems are the mundane, messy ones. handling and grasping small or deformable objects. Now, that is hard. And it gets worse. Doing it with new objects on new surfaces under unseen lighting. Now, that is nearly impossible. These demos are super impressive, but they contain none of the real challenges, so they can even be handcoded. They don't need the robot to adapt to new or changing situations. So, in short, kung fu, easy peasy. But being useful is nearly impossibly hard. I don't need you guys to do kung fu. Get out of here. I want you to fold my laundry instead. Thank you very much. Okay, but how? Well, scientists typically train a robot in a simulation before deploying it into the real world. It's like learning inside of a video game. Imagine a self-driving car. First you are in a game and when you drive safely for a long time you get a good score and then you can proceed into the real world but only then sounds good right but whenever I visit these incredible robotics labs around the world I always come back with one conclusion things work really well in a simulation and when moved to reality things break like crazy until this incredible new work appeared It sets out to solve two really tough problems. One, perform predictions over thousands of simulation steps. It needs to see forward into the future quite far. In fact, I am already getting hiccups. Then two, generalize across different tasks, environments, and different robot morphologies, different shapes. So something that is basically impossible. I don't think this is going to work. So example here is a reference simulator. This is based on physics. All handwritten equations tested to hell and back and trusted. It is super precise. However, here is the problem. It is painfully slow and it gets even worse. It is brittle. If you change the shape of the robot and a new experiment, you have to retune large parts of the setup by hand. Yuck. So, get this crazy idea. Scientists wrote an AI that looks at lots and lots of this kind of footage. Frame after frame, it studies how the world works. And later, this AI says, "Hm, I've seen enough examples of how physics behaves. So now, let's keep the equations and I'll just tell you what happens next. " And even better, they gave it the perfect name. Nerd neural robot dynamics. Hm. Well played. So nerd is a neural physics solver. So how good is it? I mean if it does not give you similar results to the real physics simulation, it's not very useful, is it? So let's compare. And wa card pole balancing is a classic task. Not that hard, but it absolutely nailed it. If it looks like a copied version of the real simulation, that's when it's good. Okay, let's look at some pendulums. Come on, man. These are idealized conditions. It's not even touching the ground. Let's try that. Okay, good. Now you get to graduate two robots. Sort of. Let's try a spider. Let me try to explain this because this absolutely blew my mind. The blue spider is running in the traditional accurate physics simulator. And the orange one. Now, hold on to your papers, fellow scholars, because that is where the insanity begins. This robot learned to walk inside the AI's imagination. And then we drop it into the game. And wow, look at that. They behave not exactly the same, but very similarly. Can you believe this? This
Segment 2 (05:00 - 09:00)
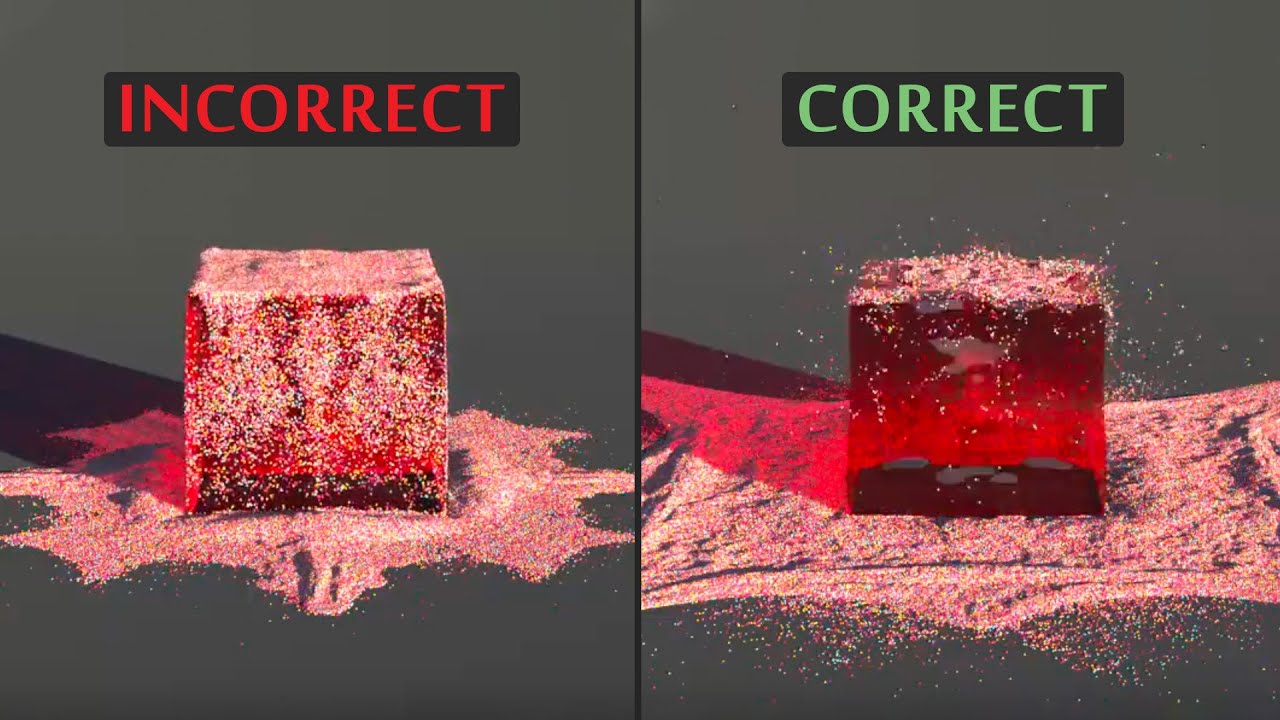
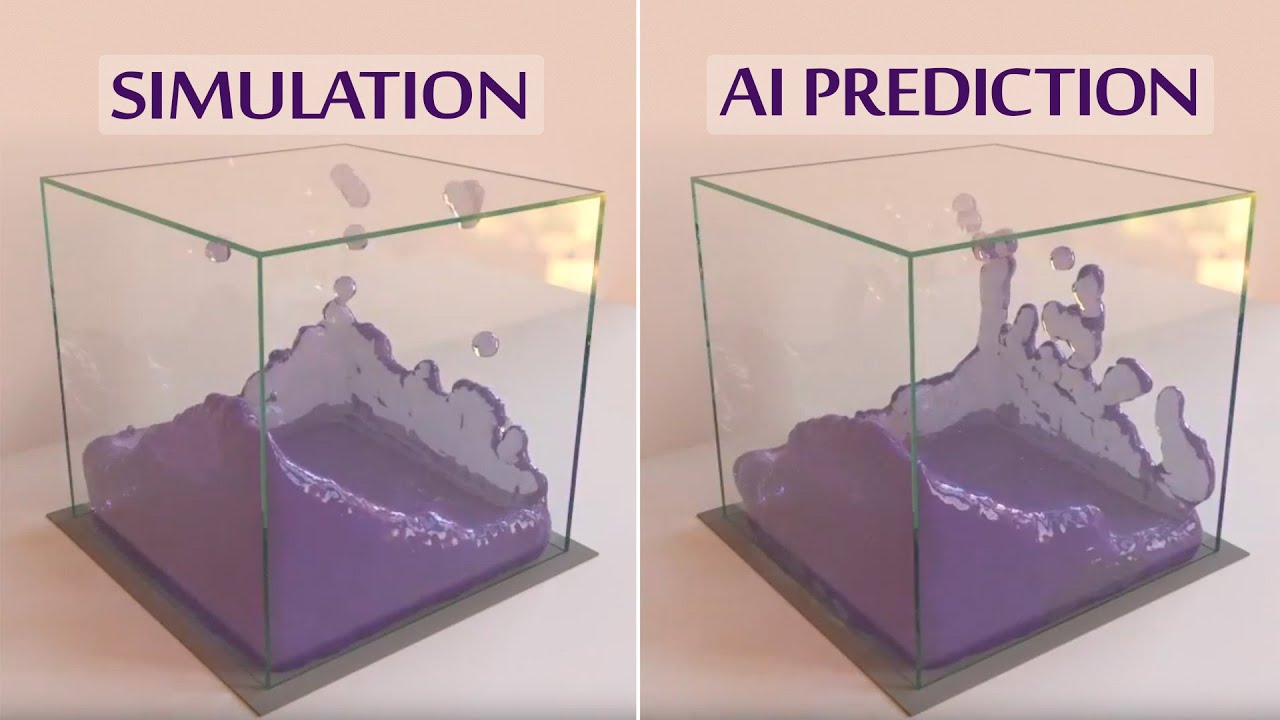
imaginary neural world works perfectly in practice. No retraining or fine-tuning is necessary. So, spider walking check mark. What about spinning? Man, both are super cute and doing super well. Wow. Okay, so now let's bring in the big guns, the real challenges. First, we generate some data. Okay. Wow. What is this chaos? Is this some kind of joke? How is this useful for anything? Well, all of these red robots are running the physics simulator. and make sure that all kinds of movements and torqus are being simulated. Now the nerd AI is watching these frame by frame. Okay, now you get your own robot and holy mother of papers. The controller trained inside the imagination of nerd can move the robot and it is super cute. Look at that bobbing. I love it. And as this robot arm works really well too, now is the time for the ultimate test to put the nerd robot out there in reality. Remember this is where everything breaks. It is supposed to touch these red points and h it not only works but it makes it look easy. I can assure you this is not what I saw when I went to these labs all around the world. Not at all. This is really challenging. Bravo. And I am just sitting here smiling and saying this is why we do science. So how does it do all this crazy magic? Well, I'll try my best to explain. Dear fellow scholars, this is two minute papers with Dr. Carola. Dr. Carol, welcome to episode 1,000. This paper describes in detail how nerd learns to predict the next change in the robot state. First, it applies motion, but it does it in the robot's own coordinate frame. Then, in the next formula, it transforms it back to world coordinates. Okay, so what does that mean? You see, the robot learns physics the same way you would learn to move through a dark room. You only feel the changes relative to yourself. So, you turn left, you go forward, and then you figure out where you ended up in the room afterward. That is so cool. And here's something that made me fall off the chair. They fine-tuned this AI on realworld cube tossing data. Here, a cube is being thrown and it hits the ground. So, what's so interesting about that? Well, Nerd matched it better than the physics simulator called Warp that created it in the first place. The student just beat the teacher. Whoa. And [clears throat] it is faster than the teacher, too. What? How is that even possible? Well, imagine that the simulator is a physics teacher who sits in a room thinking about an idealized world. But the nerd AI is the student who went outside, slipped on the ice, and learned from it. It is not just books smart, it is street smart, too. And that is the magic of artificial intelligence. Absolutely incredible. Wow. What a time to be alive. Now, this is still not perfect. Not even close. For instance, Nerd still hasn't been tested on very complex robots like humanoids. So, I'd love to see that. And if you wish to hear more about papers like this because I don't see a lot of people talking about this. Make sure to subscribe, hit the bell icon, and leave a kind comment. It helps you get more recommendations like this. Better papers, better life. And I got to say I can't stop playing with OpenAI's Open GPT model through Lambda GPU cloud. And as you see I am doing very useful things with it for science. Yes, this is actual speed. I can't believe that I can have more than 100 billion parameters running super fast here. Many of you fellow scholars are using it and if you don't make sure to check it out. It costs only a couple dollars per hour. Insanity. You can rent an Nvidia GPU through lambda. ai/papers