Beyond A*: Better Planning with Transformers via Search Dynamics Bootstrapping (Searchformer)
Machine-readable: Markdown · JSON API · Site index
Описание видео
Paper: https://arxiv.org/abs/2402.14083
Abstract:
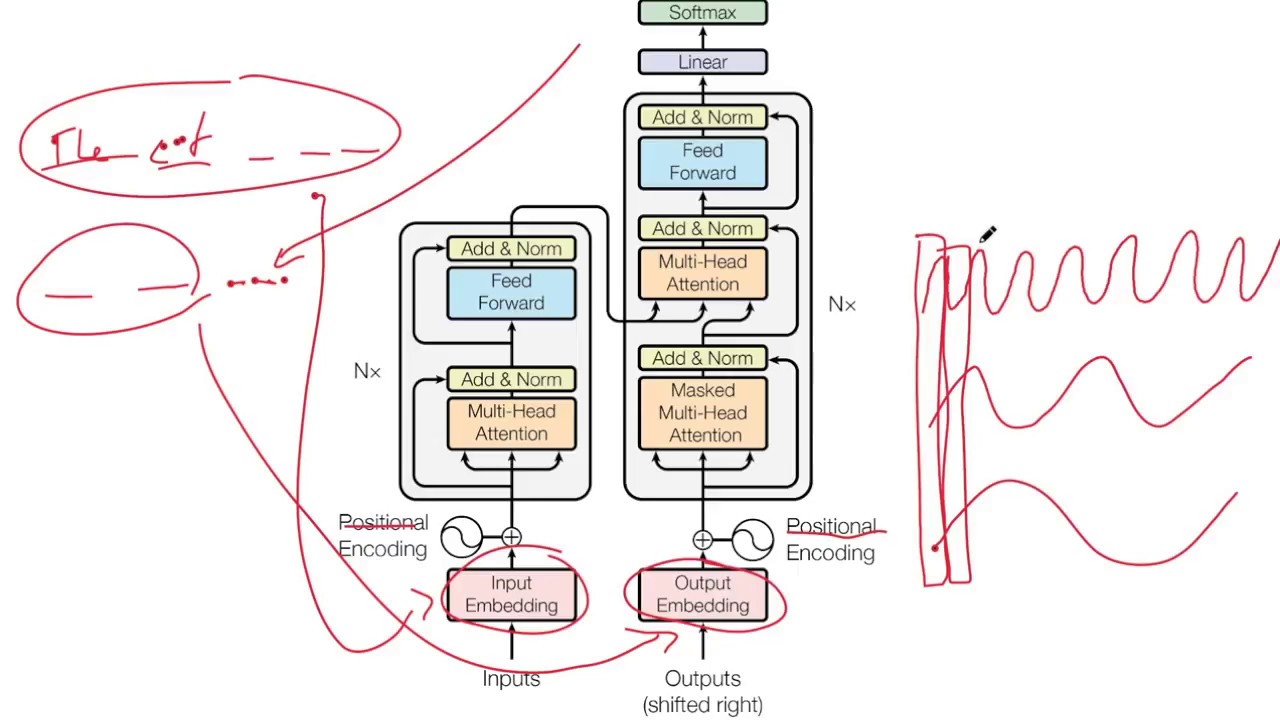
While Transformers have enabled tremendous progress in various application settings, such architectures still lag behind traditional symbolic planners for solving complex decision making tasks. In this work, we demonstrate how to train Transformers to solve complex planning tasks and present Searchformer, a Transformer model that optimally solves previously unseen Sokoban puzzles 93.7% of the time, while using up to 26.8% fewer search steps than standard A∗ search. Searchformer is an encoder-decoder Transformer model trained to predict the search dynamics of A∗. This model is then fine-tuned via expert iterations to perform fewer search steps than A∗ search while still generating an optimal plan. In our training method, A∗'s search dynamics are expressed as a token sequence outlining when task states are added and removed into the search tree during symbolic planning. In our ablation studies on maze navigation, we find that Searchformer significantly outperforms baselines that predict the optimal plan directly with a 5-10× smaller model size and a 10× smaller training dataset. We also demonstrate how Searchformer scales to larger and more complex decision making tasks like Sokoban with improved percentage of solved tasks and shortened search dynamics.
Authors: Lucas Lehnert, Sainbayar Sukhbaatar, Paul Mcvay, Michael Rabbat, Yuandong Tian
Links:
Homepage: https://ykilcher.com
Merch: https://ykilcher.com/merch
YouTube: https://www.youtube.com/c/yannickilcher
Twitter: https://twitter.com/ykilcher
Discord: https://ykilcher.com/discord
LinkedIn: https://www.linkedin.com/in/ykilcher
If you want to support me, the best thing to do is to share out the content :)
If you want to support me financially (completely optional and voluntary, but a lot of people have asked for this):
SubscribeStar: https://www.subscribestar.com/yannickilcher
Patreon: https://www.patreon.com/yannickilcher
Bitcoin (BTC): bc1q49lsw3q325tr58ygf8sudx2dqfguclvngvy2cq
Ethereum (ETH): 0x7ad3513E3B8f66799f507Aa7874b1B0eBC7F85e2
Litecoin (LTC): LQW2TRyKYetVC8WjFkhpPhtpbDM4Vw7r9m
Monero (XMR): 4ACL8AGrEo5hAir8A9CeVrW8pEauWvnp1WnSDZxW7tziCDLhZAGsgzhRQABDnFy8yuM9fWJDviJPHKRjV4FWt19CJZN9D4n