EfficientZero: Mastering Atari Games with Limited Data (Machine Learning Research Paper Explained)
Machine-readable: Markdown · JSON API · Site index
Описание видео
#efficientzero #muzero #atari
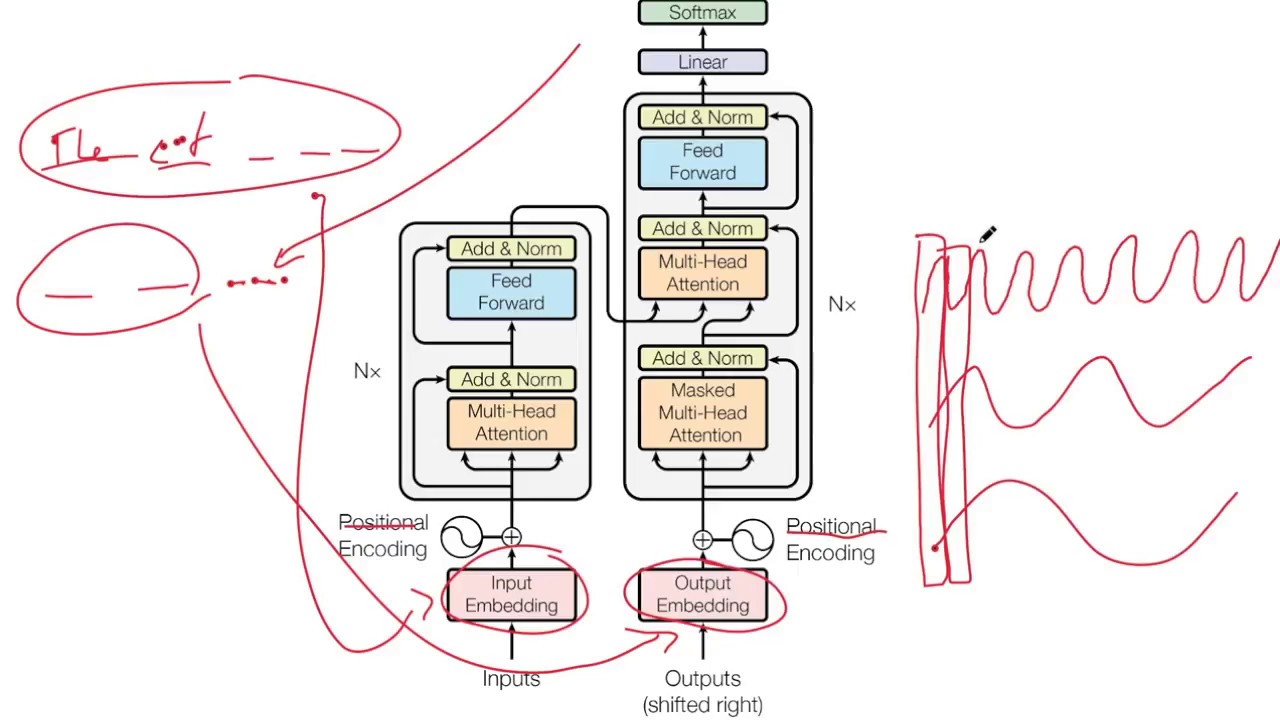
Reinforcement Learning methods are notoriously data-hungry. Notably, MuZero learns a latent world model just from scalar feedback of reward- and policy-predictions, and therefore relies on scale to perform well. However, most RL algorithms fail when presented with very little data. EfficientZero makes several improvements over MuZero that allows it to learn from astonishingly small amounts of data and outperform other methods by a large margin in the low-sample setting. This could be a staple algorithm for future RL research.
OUTLINE:
0:00 - Intro & Outline
2:30 - MuZero Recap
10:50 - EfficientZero improvements
14:15 - Self-Supervised consistency loss
17:50 - End-to-end prediction of the value prefix
20:40 - Model-based off-policy correction
25:45 - Experimental Results & Conclusion
Paper: https://arxiv.org/abs/2111.00210
Code: https://github.com/YeWR/EfficientZero
Note: code not there yet as of release of this video
Abstract:
Reinforcement learning has achieved great success in many applications. However, sample efficiency remains a key challenge, with prominent methods requiring millions (or even billions) of environment steps to train. Recently, there has been significant progress in sample efficient image-based RL algorithms; however, consistent human-level performance on the Atari game benchmark remains an elusive goal. We propose a sample efficient model-based visual RL algorithm built on MuZero, which we name EfficientZero. Our method achieves 190.4% mean human performance and 116.0% median performance on the Atari 100k benchmark with only two hours of real-time game experience and outperforms the state SAC in some tasks on the DMControl 100k benchmark. This is the first time an algorithm achieves super-human performance on Atari games with such little data. EfficientZero's performance is also close to DQN's performance at 200 million frames while we consume 500 times less data. EfficientZero's low sample complexity and high performance can bring RL closer to real-world applicability. We implement our algorithm in an easy-to-understand manner and it is available at this https URL. We hope it will accelerate the research of MCTS-based RL algorithms in the wider community.
Authors: Weirui Ye, Shaohuai Liu, Thanard Kurutach, Pieter Abbeel, Yang Gao
Links:
TabNine Code Completion (Referral): http://bit.ly/tabnine-yannick
YouTube: https://www.youtube.com/c/yannickilcher
Twitter: https://twitter.com/ykilcher
Discord: https://discord.gg/4H8xxDF
BitChute: https://www.bitchute.com/channel/yannic-kilcher
Minds: https://www.minds.com/ykilcher
Parler: https://parler.com/profile/YannicKilcher
LinkedIn: https://www.linkedin.com/in/ykilcher
BiliBili: https://space.bilibili.com/1824646584
If you want to support me, the best thing to do is to share out the content :)
If you want to support me financially (completely optional and voluntary, but a lot of people have asked for this):
SubscribeStar: https://www.subscribestar.com/yannickilcher
Patreon: https://www.patreon.com/yannickilcher
Bitcoin (BTC): bc1q49lsw3q325tr58ygf8sudx2dqfguclvngvy2cq
Ethereum (ETH): 0x7ad3513E3B8f66799f507Aa7874b1B0eBC7F85e2
Litecoin (LTC): LQW2TRyKYetVC8WjFkhpPhtpbDM4Vw7r9m
Monero (XMR): 4ACL8AGrEo5hAir8A9CeVrW8pEauWvnp1WnSDZxW7tziCDLhZAGsgzhRQABDnFy8yuM9fWJDviJPHKRjV4FWt19CJZN9D4n