This Curious Robot Should Be Impossible!
Machine-readable: Markdown · JSON API · Site index
Описание видео
❤️ Check out Weights & Biases and sign up for a free demo here: https://wandb.me/papers
📝 The paper "Curiosity-Driven Learning of
Joint Locomotion and Manipulation Tasks" is available here:
https://openreview.net/pdf?id=QG_ERxtDAP-
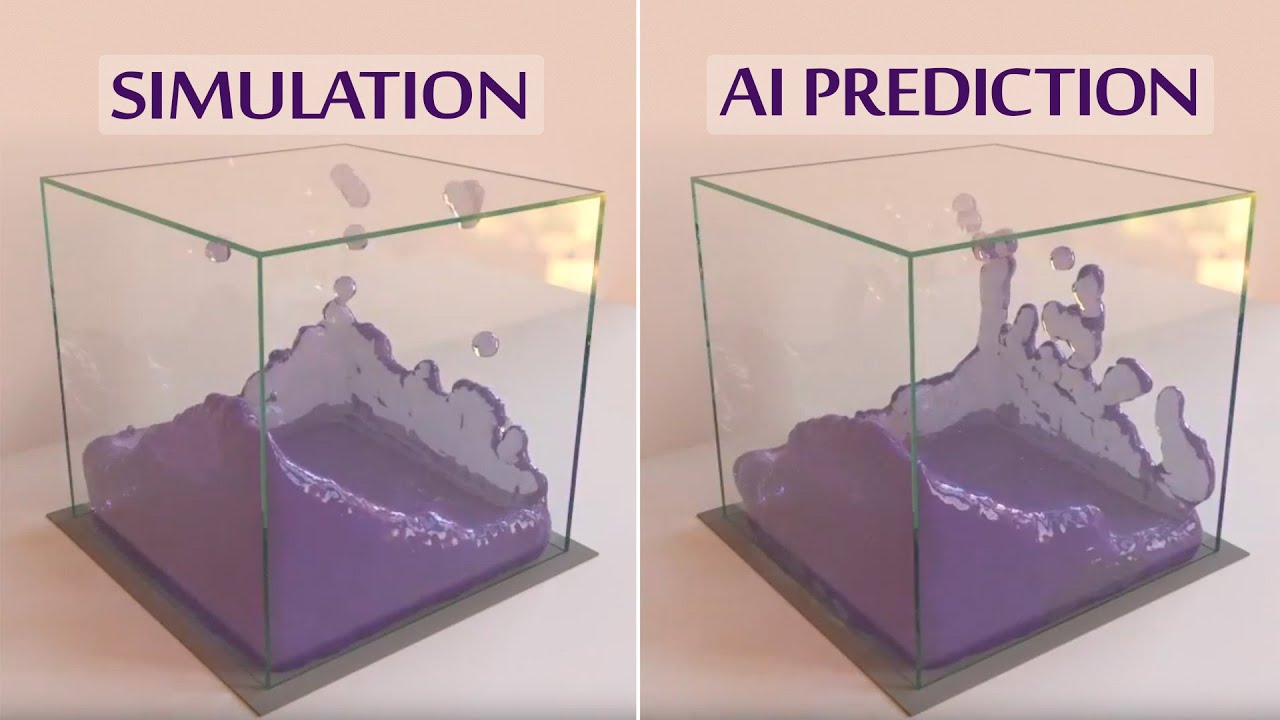
📝 My latest paper on simulations that look almost like reality is available for free here:
https://rdcu.be/cWPfD
Or this is the orig. Nature Physics link with clickable citations:
https://www.nature.com/articles/s41567-022-01788-5
🙏 We would like to thank our generous Patreon supporters who make Two Minute Papers possible:
Alex Balfanz, Alex Haro, B Shang, Benji Rabhan, Bret Brizzee, Gaston Ingaramo, Gordon Child, Jace O'Brien, Jie Yu, John Le, Kyle Davis, Lukas Biewald, Martin, Michael Albrecht, Michael Tedder, Owen Skarpness, Richard Putra Iskandar, Richard Sundvall, Taras Bobrovytsky, Ted Johnson, Thomas Krcmar, Tybie Fitzhugh, Ueli Gallizzi.
If you wish to appear here or pick up other perks, click here: https://www.patreon.com/TwoMinutePapers
Thumbnail background design: Felícia Zsolnai-Fehér - http://felicia.hu
Károly Zsolnai-Fehér's research works: https://cg.tuwien.ac.at/~zsolnai/
Twitter: https://twitter.com/twominutepapers