❤️ Check out Weights & Biases and sign up for a free demo here: https://wandb.me/papers
📝 The paper is available here:
https://github.com/Genesis-Embodied-AI/DiffTactile
https://difftactile.github.io/
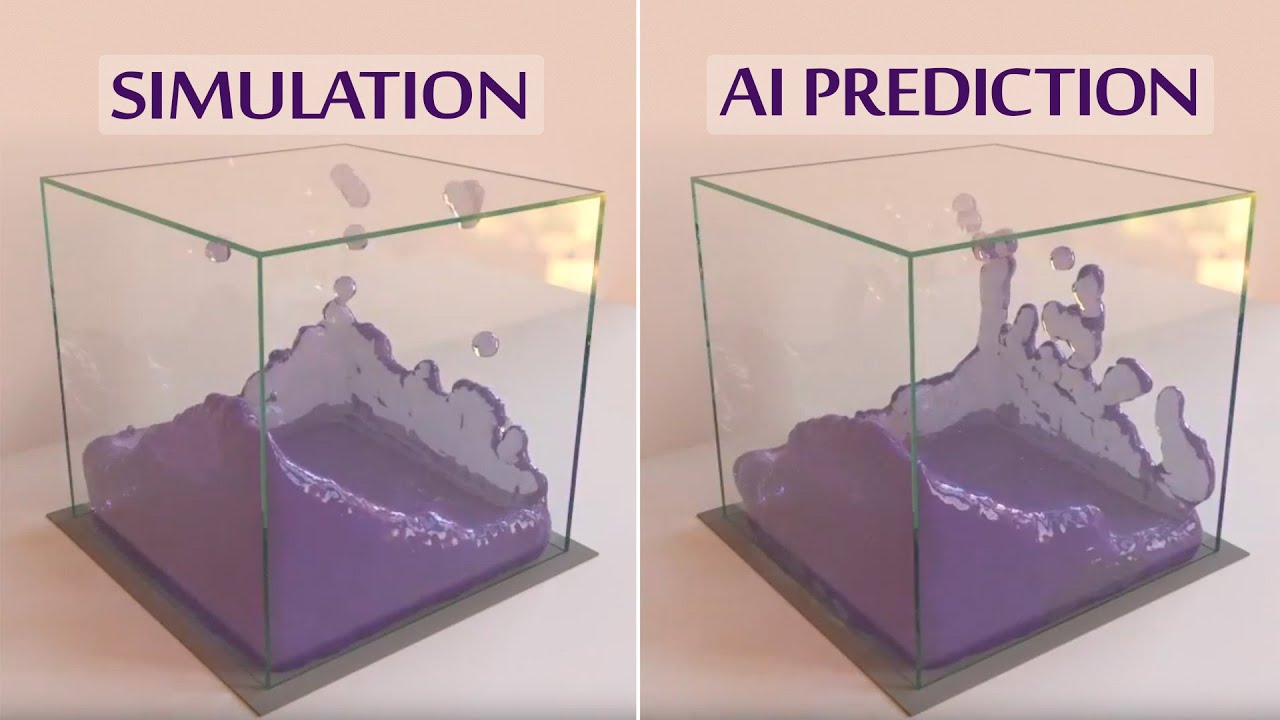
📝 My paper on simulations that look almost like reality is available for free here:
https://rdcu.be/cWPfD
Or this is the orig. Nature Physics link with clickable citations:
https://www.nature.com/articles/s41567-022-01788-5
🙏 We would like to thank our generous Patreon supporters who make Two Minute Papers possible:
Alex Balfanz, Alex Haro, B Shang, Benji Rabhan, Gaston Ingaramo, Gordon Child, John Le, Juan Benet, Kyle Davis, Loyal Alchemist, Lukas Biewald, Martin, Michael Albrecht, Michael Tedder, Owen Skarpness, Richard Sundvall, Taras Bobrovytsky,, Thomas Krcmar, Tybie Fitzhugh, Ueli Gallizzi.
If you wish to appear here or pick up other perks, click here: https://www.patreon.com/TwoMinutePapers
My research: https://cg.tuwien.ac.at/~zsolnai/
X/Twitter: https://twitter.com/twominutepapers
Thumbnail design: Felícia Zsolnai-Fehér - http://felicia.hu
Оглавление (2 сегментов)
Segment 1 (00:00 - 05:00)
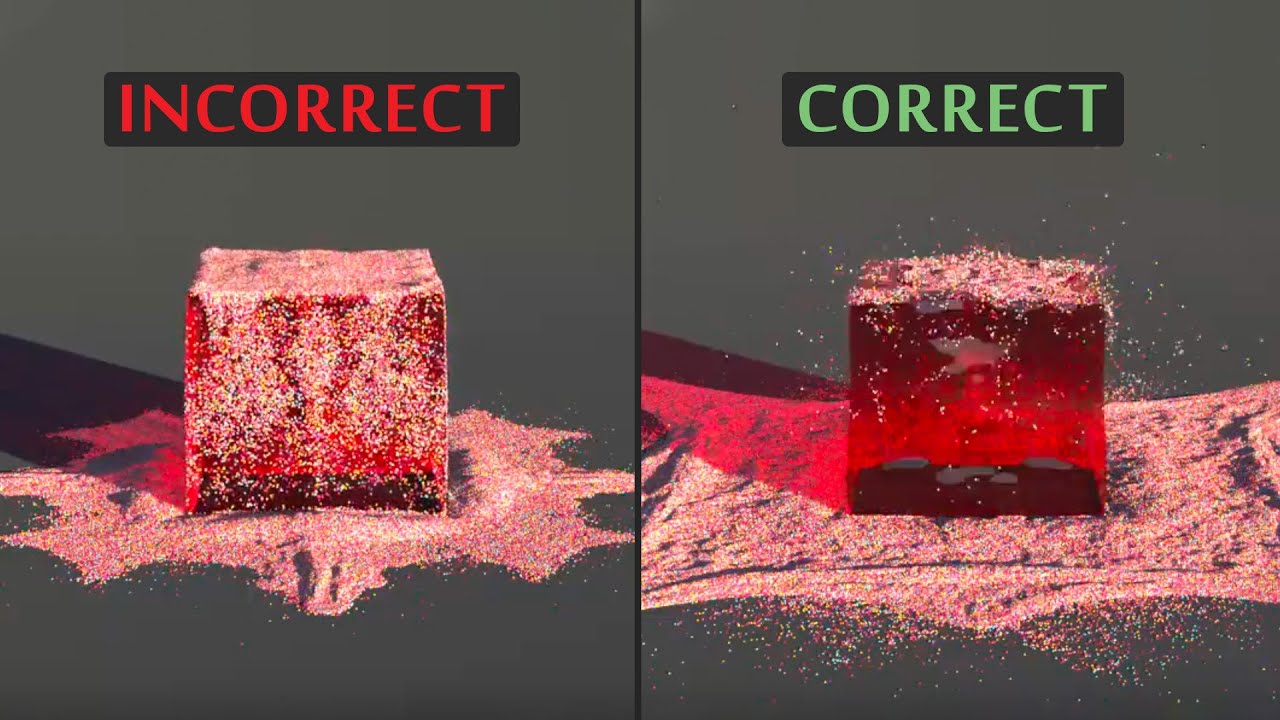
It’s crazy that no one is talking about this. This work was done as a collaboration between several research labs across the world and is about creating physics simulations on a computer to teach AIs about the world. And what are the simulations about? Well, to help robots noodle around with things. Yes, I hear you saying Károly, what does that mean? Let me try to explain. When we try to teach a robot to navigate safely in the real world, first, we don’t just drop them on the street and let them learn the basics there, not at all. What we do is that they put it in a simulated environment where we can give it crazy hard tasks, and when it has demonstrated that it has learned everything and is safe, then we can consider testing them in reality. This is called sim to real. Going from simulation to reality. Self-driving cars and robots are doing better and better in this regard, we have these little computer games where they can train. But for everyone else, there are two huge problems. Problem number one. For robots that are not driving but moving objects around, they keep on touching things, they don’t have a really good game to play yet. But wait, is grasping that hard? Well, for us, it is not hard at all. By the time we are small children, this is more or less child’s play for us. But, for robots? Yes, it is incredibly hard. Look. If it grasps too lightly, this happens, and if it grasps too hard, the results are quite predictable. It has to do everything with just the right amount of force. And that needs tons and tons of learning, and tons of training data. So, for these robots that have tactile sensors, this fantastic new paper contains a video game for virtual robots to play in, but it gets better. In this game, they are meant to touch things and based on how they feel, follow their surfaces, open a box, move an object and so on. But unfortunately we are still not ready to solve this grasping task because we have one more huge problem. Dear Fellow Scholars, this is Two Minute Papers with Dr. Károly Zsolnai-Fehér. So what is problem number two? It is the sim to real gap. A simulation is great, however, reality is not like a video game. You can try to simulate everything down to the tiniest detail, but when entering the real world, plans go wrong all the time. So does it even make sense to have a video game that does not teach reality, but it teaches useful knowledge in a made-up world? Of course, it doesn’t. So what can we do with that? Oh my, look at that. This is a differentiable system, which means that when we go from simulation to reality, and we see that there is a gap, we can account for the differences, and automatically reprogram it to match reality much more closely. In short, we can close the gap between simulation and reality. That is absolutely incredible and is one of the key elements to make useful robots to fold our laundry in the future. So, can it finally do the grasping problem? We will see in just a moment. Now, there are many previous systems that can do parts of what this is doing. Rigid bodies, soft bodies, differentiability, optical simulations, they can do parts of it, but this new system seems to be the only one that has it all. And, whoa, look at that. It uses taichi as a backend. Yes, Fellow Scholars, this is something that we have talked about approximately 600 videos ago. Yes, I think this might be the only corner of the internet where you see the history of these research works unfold right before your eyes. Amazing. I love my work. Now, grasping. You remember that too soft was not great, grasping too hard, also not great, but after learning in this simulated environment, let’s see…yup. That is just the right amount of force! This concept really works! So cool! So I would like to send a huge thank you for these brilliant scientists, for giving this away for all of us for free. And of course, a big thank you to this cat too who surely is the mastermind behind all this. It is probably thinking, finally, I am inventing robots that play pat-a-cake cake with us! What a time to be alive! I mean, when cats do it among themselves, it always ends up in a brutal fight. Look at that. And I hear so few people talking about this, it’s crazy, and this is why Two Minute Papers exists. Not to create videos that are two minutes long,
Segment 2 (05:00 - 05:00)
I have clearly failed mightily at that. It exists to talk about amazing research papers, and amazing human achievements that very few people, if anyone is talking about. Subscribe and hit the bell icon if you wish to hear more. And what would you Fellow Scholars use this for? Let me know in the comments below.