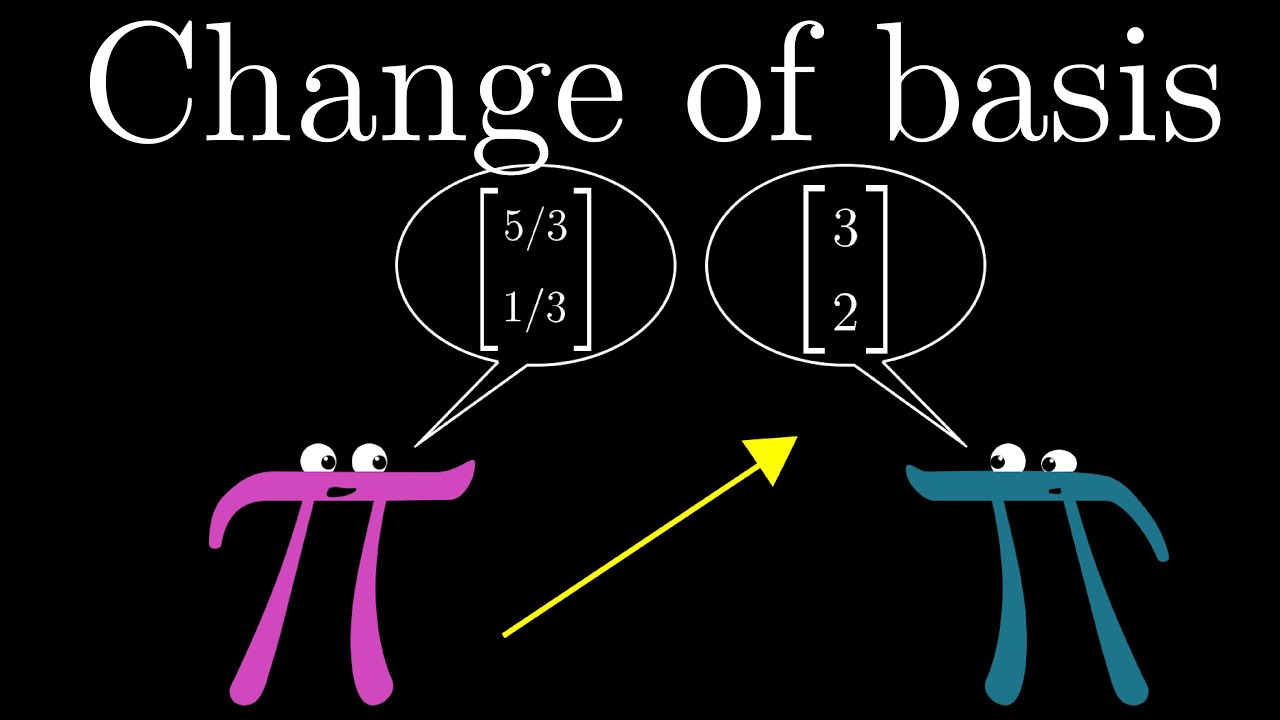
We're all looking at the same vectors in space, but Jennifer uses different words and numbers to describe them. Let me say a quick word about how I'm representing things here. When I animate 2D space, I typically use this square grid. But that grid is just a construct, a way to visualize our coordinate system, and so it depends on our choice of basis. Space itself has no intrinsic grid. Jennifer might draw her own grid, which would be an equally made up construct meant as nothing more than a visual tool to help follow the meaning of her coordinates. Her origin though would actually line up with ours, since everybody agrees on what the coordinates 0,0 should mean. It's the thing that you get when you scale any vector by 0. But the direction of her axes and the spacing of her grid lines will be different, depending on her choice of basis vectors. So after all this is set up, a pretty natural question to ask is how we translate between coordinate systems. If for example, Jennifer describes a vector with coordinates negative 1,2, what would that be in our coordinate system? How do you translate from her language to ours? Well, what her coordinates are saying is that this vector is negative 1 times b1 plus 2 times b2. And from our perspective, b1 has coordinates 2,1, and b2 has coordinates negative 1,1. So we can actually compute negative 1 times b1 plus 2 times b2 as they're represented in our coordinate system. And working this out, you get a vector with coordinates negative 4,1. So that's how we would describe the vector that she thinks of as negative 1,2. This process here of scaling each of her basis vectors by the corresponding coordinates of some vector, then adding them together, might feel somewhat familiar. It's matrix-vector multiplication, with a matrix whose columns represent Jennifer's basis vectors in our language. In fact, once you understand matrix-vector multiplication as applying a certain linear transformation, say by watching what I view to be the most important video in this series, chapter 3, there's a pretty intuitive way to think about what's going on here. A matrix whose columns represent Jennifer's basis vectors can be thought of as a transformation that moves our basis vectors, i-hat and j-hat, the things we think of when we say 1,0 and 0,1, to Jennifer's basis vectors, the things she thinks of when she says 1,0 and 0,1. To show how this works, let's walk through what it would mean to take the vector that we think of as having coordinates negative 1,2 and applying that transformation. Before the linear transformation, we're thinking of this vector as a certain linear combination of our basis vectors, negative 1 times i-hat plus 2 times j-hat. And the key feature of a linear transformation is that the resulting vector will be that same linear combination but of the new basis vectors, negative 1 times the place where i-hat lands plus 2 j-hat lands. So what this matrix does is transform our misconception of what Jennifer means into the actual vector that she's referring to. I remember that when I was first learning this, it always felt kind of backwards to me. Geometrically, this matrix transforms our grid into Jennifer's grid, but numerically, it's translating a vector described in her language to our language. What made it finally click for me was thinking about how it takes our misconception of what Jennifer means, the vector we get using the same coordinates but in our system, then it transforms it into the vector that she really meant. What about going the other way around? In the example I used earlier this video, when I had the vector with coordinates 3, 2 in our system, how did I compute that it would have coordinates 5 thirds and 1 third in Jennifer's system? You start with that change of basis matrix that translates Jennifer's language into ours, then you take its inverse. Remember, the inverse of a transformation is a new transformation that corresponds to playing that first one backwards. In practice, especially when you're working in more than two dimensions, you'd use a computer to compute the matrix that actually represents this inverse. In this case, the inverse of the change of basis matrix that has Jennifer's basis as its columns ends up working out to have columns 1 third, negative 1 third, and 1 third, 2 thirds. So, for example, to see what the vector 3, 2 looks like in Jennifer's system, we multiply this inverse change of basis matrix by the vector 3, 2, which works out to be 5 thirds, 1 third. So that, in a nutshell, is how to translate the description of individual vectors back and forth between coordinate systems. The matrix whose columns represent Jennifer's basis vectors but written in our coordinates translates vectors from her language into our language. And the inverse matrix does the opposite. But vectors aren't the only thing that we describe using coordinates. For this next part, it's important that you're all comfortable representing transformations with matrices and that you know how